简体中文
简体中文 English
English-
High Technologyhigh-tech enterprises
-
8:00-16:30Service Hours


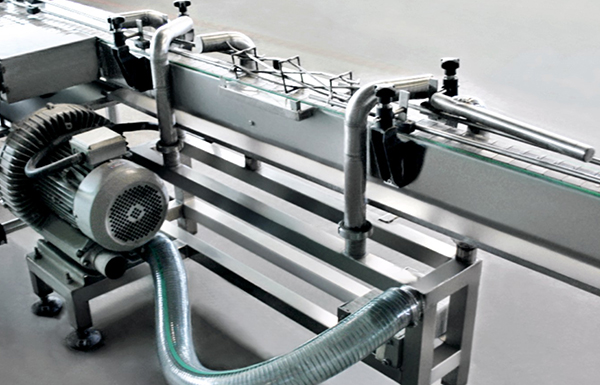
This machine is suitable for automatic can unloading the outer packages material is tinplate,aluminium can.The production capacity is 0-600cans per minute,is a first production for a certain scale beverage, canned food factory.
The principle
Take the empty cans fulled in the pallet on the pallet convey chain by the forklift, then send it to the host pallet lifting platform.The pallet lifting platform lift the fulled pallet up on a unloading height, the cylinder drives the thrusting caps baffle and thrusts the whole tier cans to the net belt, then turn back to the ready position and continue to thrust the next tier.Each tier clapboard absorbed by the to vacuum chuck to put on the dedicated paperboard platform, after unloading the empty cans the empty pallet board fall down to the chain conveyor horizontal position automatically. When the next empty cans thrusted in send the empty pallet on the automatic piling up pallet device of the back of the depalletizer, over lay one by one tier automatically to reach a certain quantity and fork the whole crib.
The feature
Main technical parameters
|
Production Capacity: |
0-600cans/min |
|
Power: |
5.5kw |
|
Applicate Pallet |
1100*1400mm |
|
Weight: |
4200kg |
|
Dimensions: |
13000*4000*3600mm |
As a well-known China JC600 Full Automatic Empty Cans Depalletizer suppliers and JC600 Full Automatic Empty Cans Depalletizer company, our factory has advanced equipment and inspection instruments, fine technique and strict and perfect quality management system, and moreover, it gathers professional elites and science and technology team with leading level, so as to make full use of new technology, new technique and new materials to guarantee stability and reliability of products.